Portal of centralized services and information
of the Innovation Information Center
of the Ministry of Education of Turkmenistan
of the Innovation Information Center
of the Ministry of Education of Turkmenistan
Portal of centralized services and information
of the Innovation Information Center
of the Ministry of Education of Turkmenistan
of the Innovation Information Center
of the Ministry of Education of Turkmenistan
Independent Neutral Turkmenistan - the
homeland of purposeful winged horses



News
Innovation information center
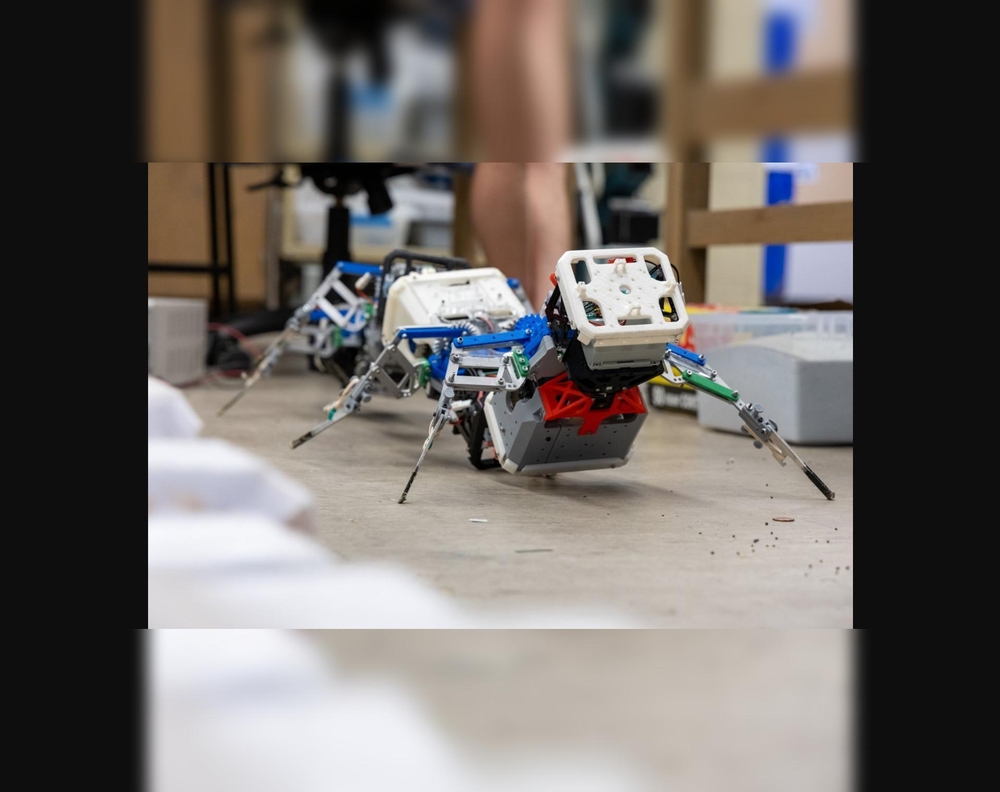
Köp aýakly robotlaryň modelleri döredildi
09.05.2023
195